關注我們
4008-060-618公司地址:廣州市番禺區南村鎮市新路103工業園生產基地:廣州市番禺區南村鎮市新路北段325號
留言
富華智能科技 版權所有 ? CopyRight (2020-2022) 粵ICP備16097240號


近日,斯坦福大學TWIST(全身遙操作模仿系統)正將人類的全身運動實時轉化為機器人行動,開啟通用機器人智能的新時代。相較于傳統遙操作系統局限于單一任務的訓練,虛擬動點OptiTrack系統加持下的TWIST系統則將復雜場景下的機器人全身協調運動變成現實,讓機器人展現出前所未有的靈活性。

從人類運動到機器人智能的橋梁
傳統遙操作系統難以應對日常生活復雜任務,如雙手持物用腳開門或彎腰清理床底,因其缺乏全身協調能力。TWIST通過實時模仿人類運動,遙操作人形機器人完成抬箱子、踢足球、側身行走及華爾茲舞等任務,需上肢、下肢和軀干同步協作。TWIST將遙操作轉化為“實時運動重定向和追蹤”任務,利用高精度數據,再通過重定向算法生成機器人關節位置和根速度目標,最后由結合強化學習和行為克隆的神經網絡控制器驅動。斯坦福團隊強調,高品質實時數據是關鍵,虛擬動點OptiTrack系統以光學追蹤技術提供高精度、低延遲數據,支持從模擬到真實世界的無縫應用。

精準捕獲,實時傳輸
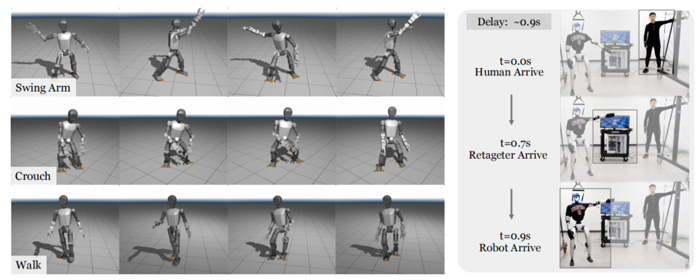
在TWIST項目中,OptiTrack系統憑借高精度、低延遲、高幀率等優勢,直接解決了實時遙操作中的兩大痛點:延遲和準確性。斯坦福研究團隊通過OptiTrack系統捕捉了亞毫米級的人類全身關節高精度數據,并以高幀率重定向轉化為機器人目標,同時,OptiTrack系統的魯棒性確保了即使在遮擋或快速運動下,數據也不會丟失或扭曲,有效避免了根位置漂移問題,確保機器人步態穩定。并且,OptiTrack系統的實時性能成為TWIST低延遲遙操作的關鍵。

虛擬動點OptiTrack系統為TWIST提供精準數據
從踢球到舞蹈的全身協調
TWIST項目的演示視頻展示了虛擬動點OptiTrack系統的實際貢獻。以“腿部操縱”為例,機器人能雙手持物同時用腳踢開門或大力踢足球。OptiTrack系統的高頻追蹤捕捉到了踢球瞬間的根速度變化,確保機器人不失衡。斯坦福大學研究團隊提到,純強化學習控制器易出現猶豫行為,但結合OptiTrack系統訓練出的控制器更平滑。

在表達性運動中,如與人類共舞華爾茲,OptiTrack系統的精度讓機器人捕捉到微妙的手臂擺動和步態同步。無論是Unitree G1還是Booster T1的本體運動都具備更為穩定和精準的表現。

這些實際案例證明,虛擬動點OptiTrack系統不僅提供高精度的數據,更是提升系統魯棒性的催化劑,實現前所未有的可達性——機器人幾乎能用手觸及腳趾。
Booster T1與Unitree G1
斯坦福大學的TWIST項目標志著人形機器人全身遙操作的里程碑,而虛擬動點OptiTrack系統不僅解決了數據瓶頸,還賦予機器人人類般的靈巧與協調,推動了從實驗室到現實的跨越。我們同樣期待,在虛擬動點的數據與訓練服務支持下,幫助更多機器人伙伴實現科研成果和本體能力的突破,虛擬動點也將站在AI與空間計算的基礎上,持續助力人類與機器的和諧共融。